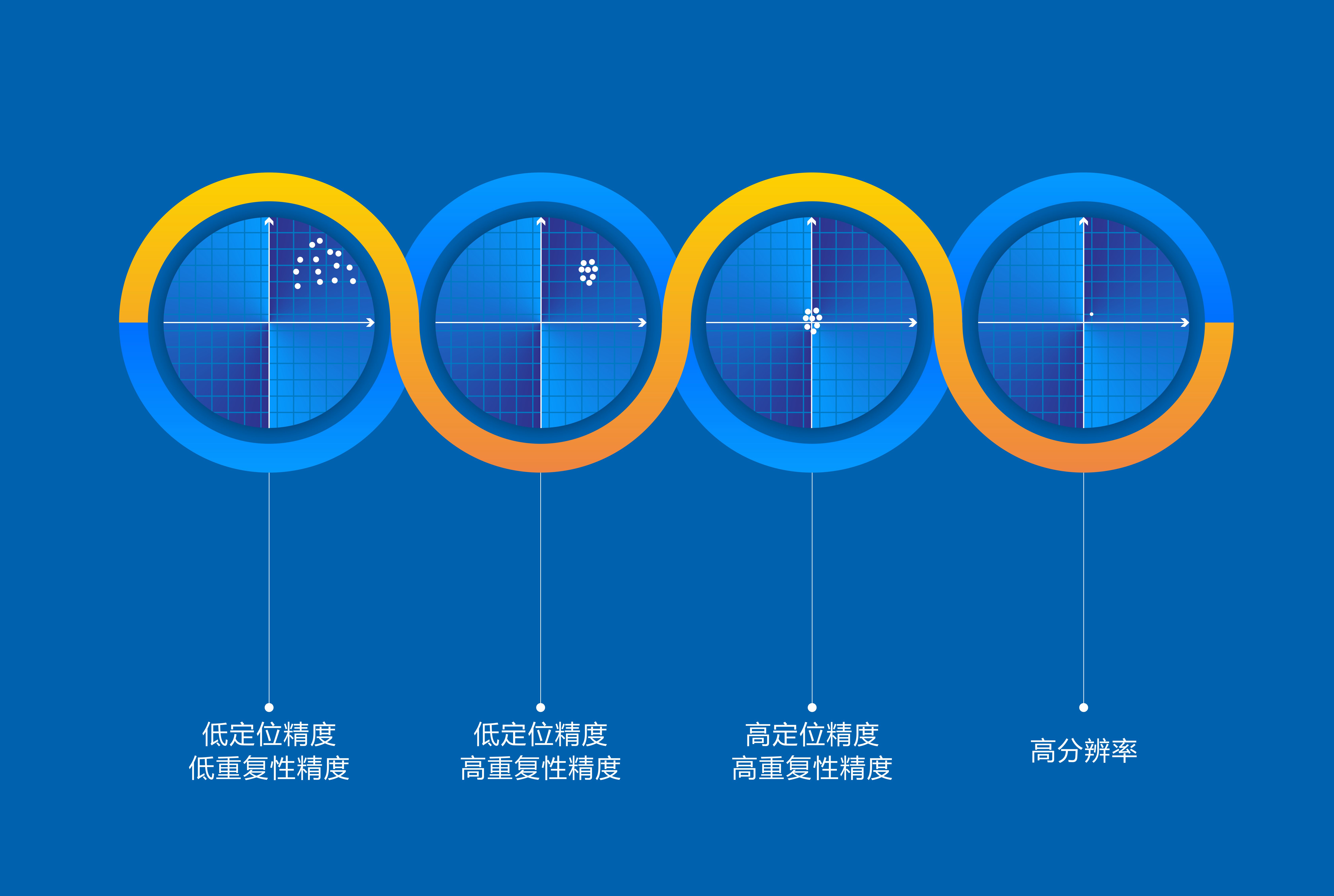
定位精度:
在三维空间一个特定的测试点,定位精度是空间中的实际位置与由测量设备测量的位置之间的误差。移动台的精度受反馈机构(线性编码器、旋转编码器、激光干涉仪)、驱动机构(滚珠丝杆、丝杆、直线电机)和轴承方式的影响,用激光干涉仪作为测试工具。比如要求一个轴走100mm,结果实际上它走了100.01,那定位精度是0.01mm。
重复定位精度:
在相同条件下,系统被重复地命令到一个位置时所达到的位置范围。单向重复性是通过从一个方向接近一个点来测量的,忽略了系统内的回跳或滞后的影响。双向重复性度量从两个方向返回到点的能力。许多厂商将重复性指定为±(分辨率)。这是在编码器测量的任何数字伺服系统的重复性。所有的技术规范,包括阿贝误差、摩擦等的影响,都是基于实际操作条件和使用,而不是基于理论值。
微动步距:
系统最小的移动步长,分辨率由反馈装置和运动系统的决定,理论分辨率可能超过实际分辨率。例如,在基于滚珠螺杆的定位系统中,通过组合4mm / 转的螺杆,1000线编码器和x1000倍细分可以获得4nm的理论分辨率。 由于摩擦,卷绕和机械可塑性,实际运动永远无法达到单个4nm步长。 因此,实际的分辨率实际上更少。
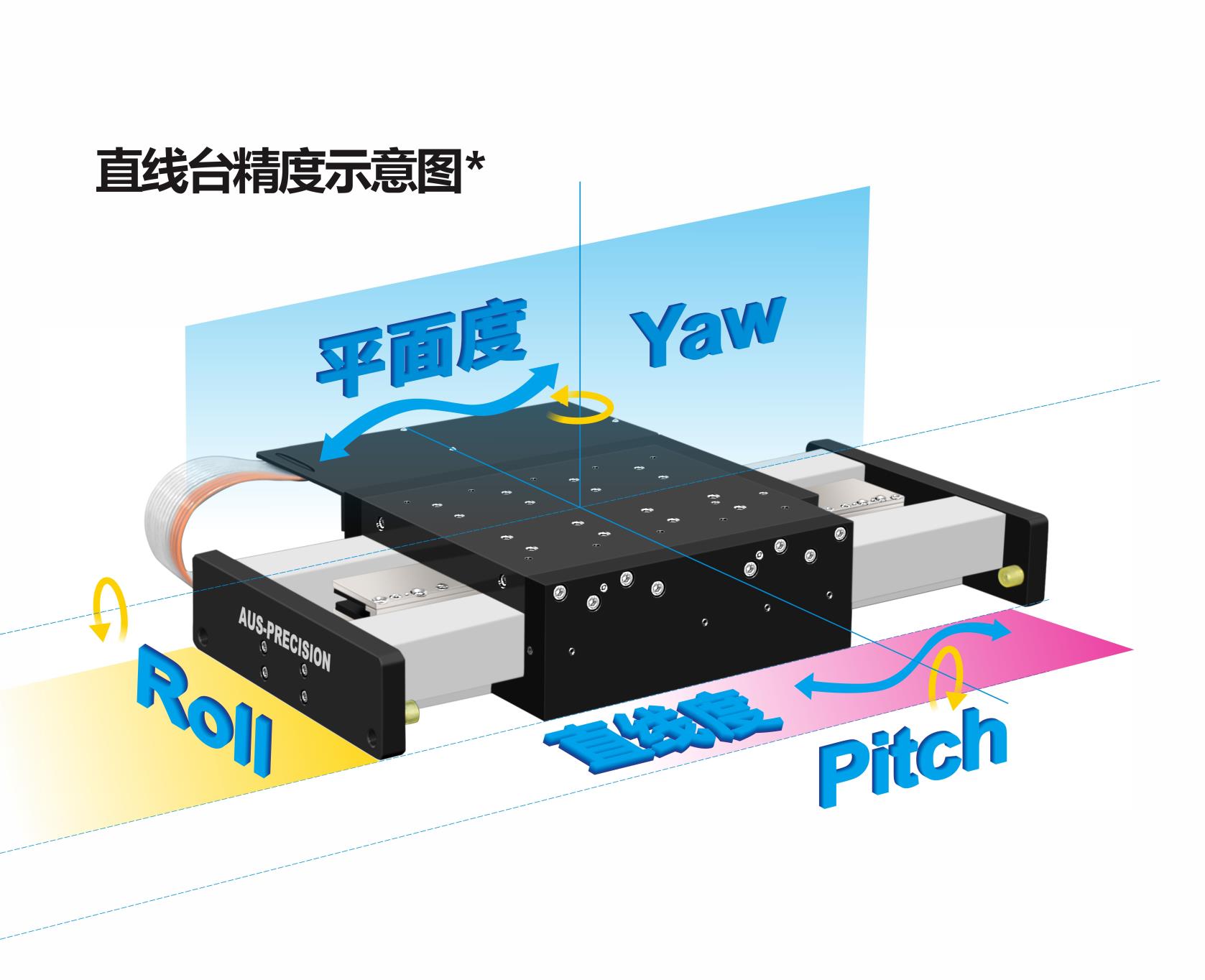
直线度误差:
直线度是位移台在水平方向移动时于垂直水平轴线的左右方向的偏差。 对于上面列出的平台组件,X轴平台的行程的直线度误差将导致Y方向上的定位误差。Y轴的直线度偏差将导致X方向上的定位误差。
平面度误差:
平面度(垂直于直线度)是位移台在水平方向移动时于垂直于水平轴线上下方向的偏差。 对于所示的位移台组件,X轴或Y轴平台的行程中的平面度偏差将导致Z方向上的定位误差。
Pitch误差:
俯仰是围绕水平轴的旋转平面垂直于移动方向,如果被测位置点不在旋转中心,那么俯仰旋转将导致二维的阿贝误差。 对于X轴,俯仰旋转将导致X和Z方向上的阿贝误差。 对于Y轴,俯仰旋转将导致Y和Z方向上的阿贝误差。 这些误差的大小可以是通过偏移距离的长度乘以旋转角度的正弦或余弦来确定。
Roll 误差:
滚动是围绕水平轴旋转平行于移动方向的平面,如果被测量的位置点不在旋转中心,则滚动旋转将导致二维的阿贝误差。 对于X轴,滚动旋转将导致Y和Z方向上的阿贝误差,对于Y轴,滚动旋转将导致X和Z方向上的阿贝误差,可以通过偏移距离的长度乘以旋转角度的正弦和余弦来计算这些误差的大小。
Yaw误差:
偏转是围绕垂直于移动方向的垂直平面中的轴的旋转,如果被测量的位置点不在旋转中心,那么偏航旋转将导致二维的阿贝误差。对于X轴或Y轴平台,偏航旋转将在X和Y方向上引起阿贝误差,这些定位误差的大小可以通过偏移距离的长度乘以旋转角度的正弦和余弦来计算。
如需更多的信息,欢迎致电我们。